预览加载中,请您耐心等待几秒...
预览加载中,请您耐心等待几秒...
1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共76页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
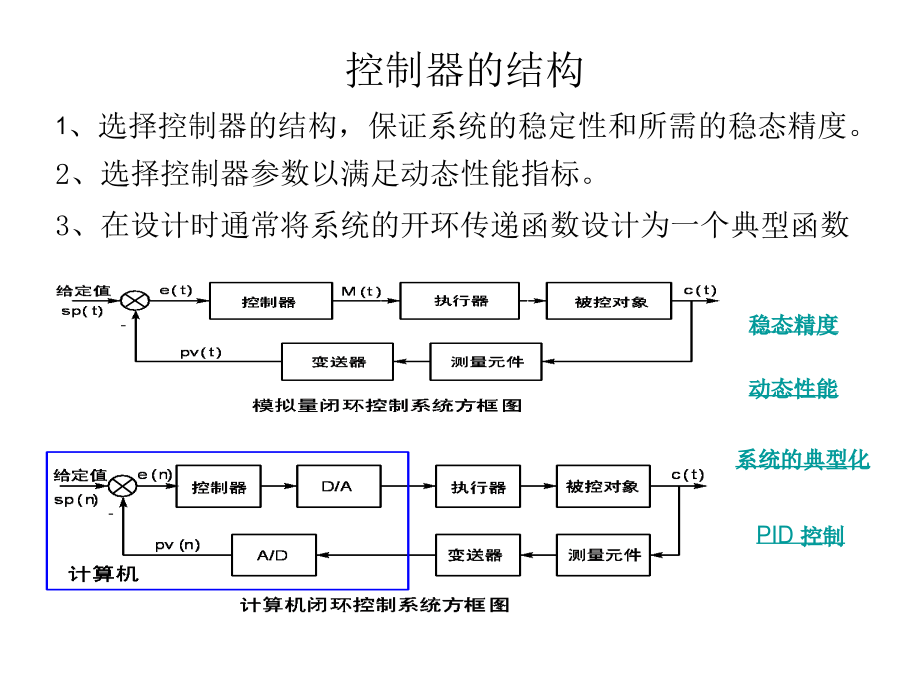
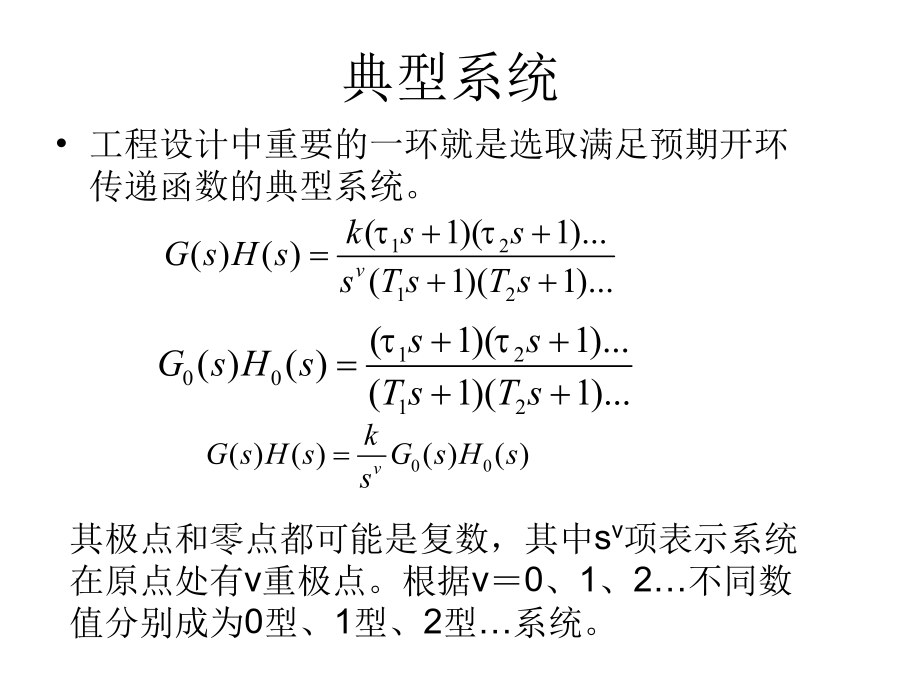
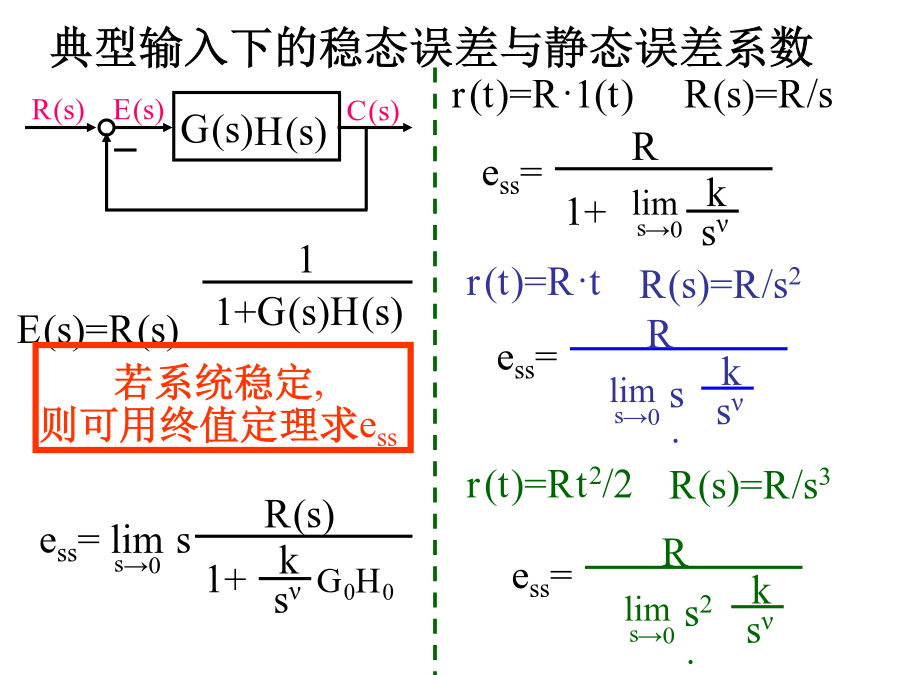
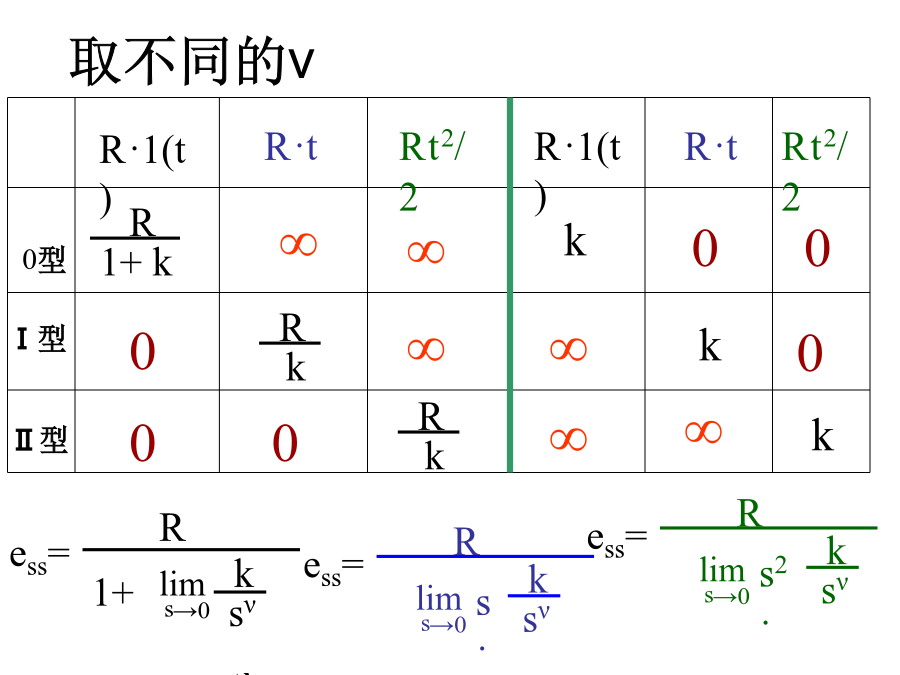
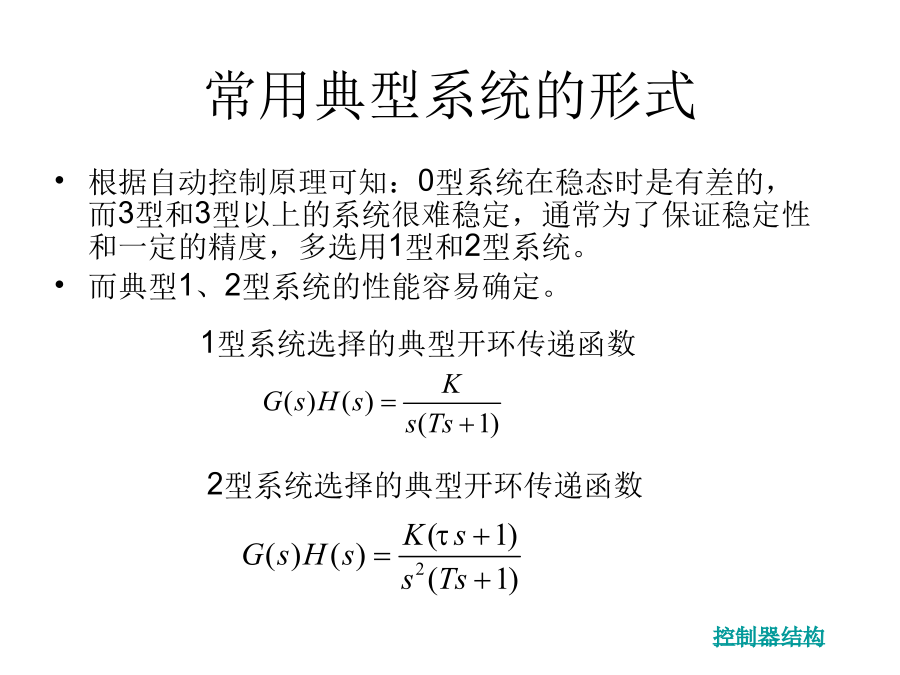
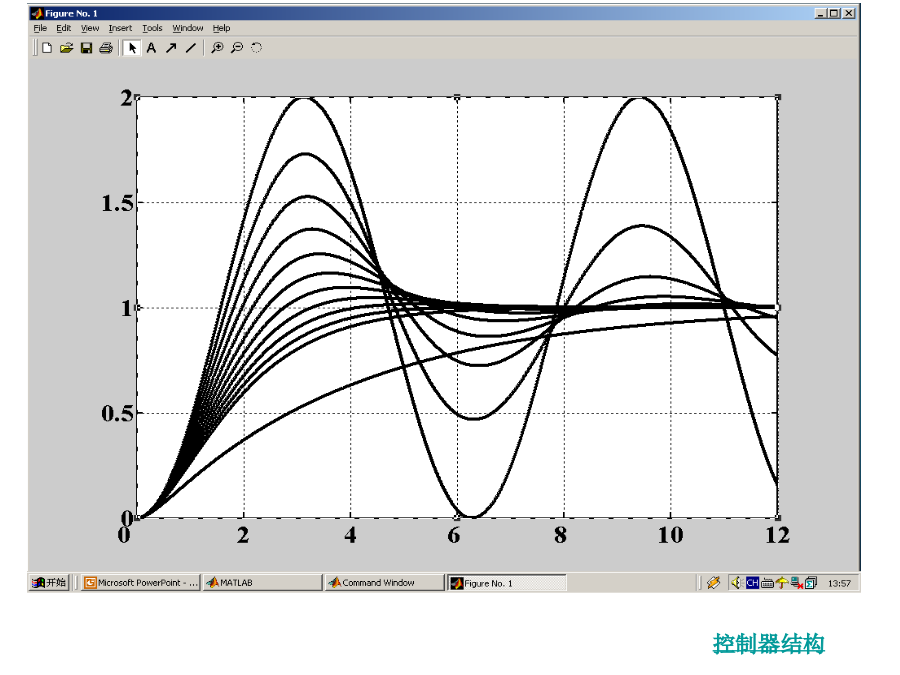
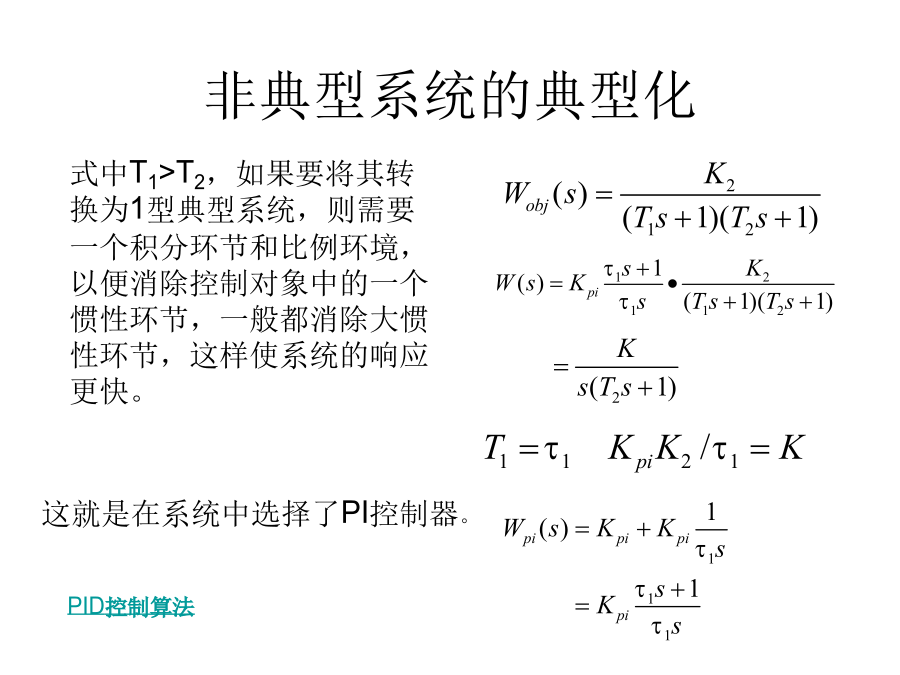
工控机的常用控制算法控制器的结构典型系统典型输入下的稳态误差与静态误差系数取不同的ν常用典型系统的形式控制器结构非典型系统的典型化非典型系统的典型化非典型系统的典型化非典型系统的典型化数字PID控制算法数字PID控制算法位置式PID的控制算法返回数字PID位置式PID算法的原理图递推式PID控制算法递推式PID的程序框图PID增量式控制算法增量式PID算法的程序框图比例控制器比例控制器的作用积分控制器积分控制器PI调节器比例微分调节器微分不完全微分PID不完全微分PID算法离散化理想PID微分先行PID算法两种结构的特点积分分离法积分控制器采用积分分离法的PID位算法流程图变速积分PID控制算法其它改进方法其它改进方法时间最优PID要求过渡过程时间最短的位置控制。大误差时为Bang-bang控制,小误差时为PID。设负载转矩ML=0,恒转矩起动(恒电流),产生恒加速度,ω线性增加,M=0时,ω不变,θ线性增加,需停止时加恒-Mm,ω线性减少至0,θ刚好到设定值。实际上很难办到,可与PID结合,小误差时用PID。带死区的PID控制死区PID执行机构不能频繁动作时,可在PID之前加死区。|e(k)|<设定值时,比例、微分部分为0,控制器的输出值不变。大滞后Smith预估控制对于这样的对象,用一般的PID调节规律是难以得到好的动态特性的,特别是当滞后时间τ较大时会产生持续振荡,使系统的稳定性降低。一个补偿的办法是采用史密斯(Smith)预测器。其它改进方法实验经验法确定PID调节参数1.扩充临界比例度法选T<0.1对象纯滞后时间常数,闭环比例控制,增大Kp,至产生等幅振荡,比例度k=1/Kp,得周期Tk和临界比例度k。根据控制度查表可得控制器的参数。控制度难测,可试定其值。控制度=1:1.05时可认为二者效果相当。有的系统不允许大幅振荡,做实验有风险。2.扩充响应曲线法开环,求对象的阶跃响应,易实现,在曲线上最大斜率处作一条切线,求得对象的滞后时间θ和时间常数τ。查表3.2即可求得KP、TI、TD和T。调整步骤(1)开始可用比例控制,初定参数。(2)如ess大,用PI,原Kp减小20%,Ti由大减小,反复调节KpTi。(3)如动态不好可加微分,Td从0增大,反复调节Kp,Ti和Td。可用运放模拟对象,闭环调试。Z变换z的方次越高,就意味着这个信号的持续时间越长。如果如果对系统作z变换例:F(Z)=长除法离散的方法差分变换法差分变化法的实例零阶保持器法零阶保持器法零阶保持器法的实例双线性变换法双线性变换法的实例三阶系统的PID设计无控制器的时域图无控制器的频域图三阶系统的PID设计比例控制器的时域图比例控制器的频域图比例控制器的时域图1比例控制器的时域图2比例积分控制器的频域图PID控制时域图1PID控制时域图2PID控制频域图