 预览加载中,请您耐心等待几秒...
预览加载中,请您耐心等待几秒...
1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共45页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
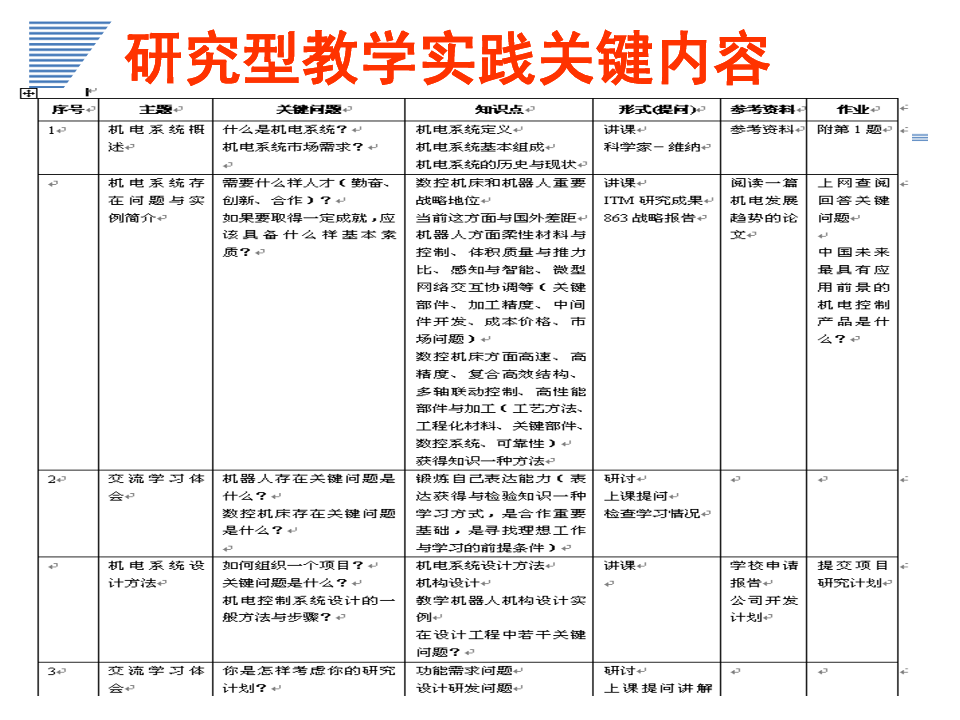
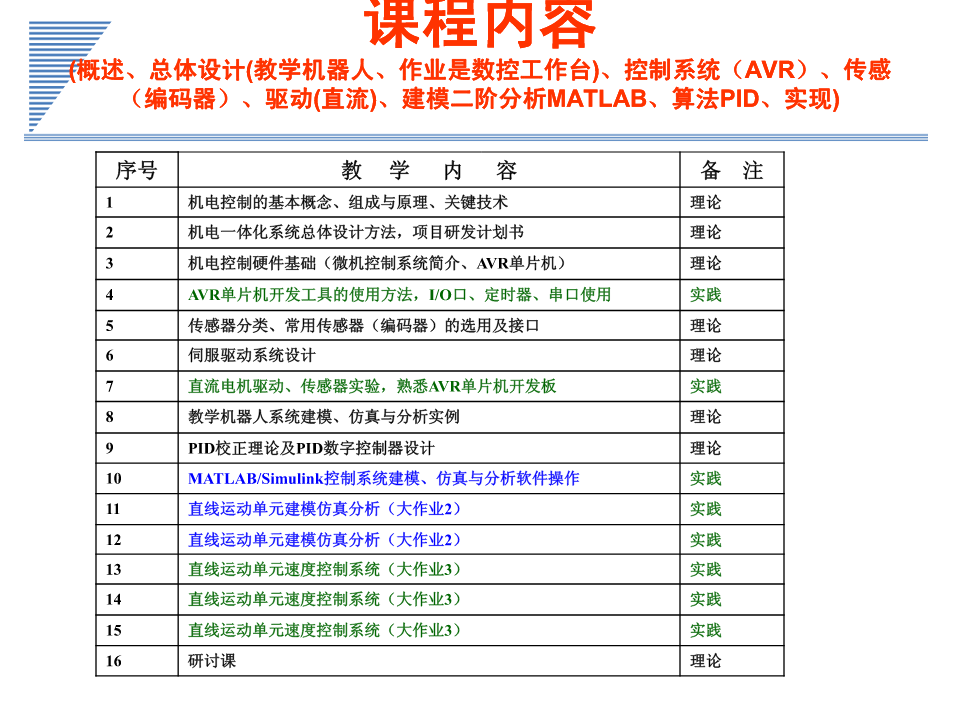
现代机电控制(研究生)王田苗北航机器人研究所问题?该课程有何用?(WHY)如何教与学?该课程的内容?(WHAT)如何考核?(HOW)课程简介学时:32h性质:机械工程专业的研究生必修课目的:–巩固基础知识–强调学以致用,突出工程实践能力–培养创新能力课程概况1课程简介2教学大纲3PBL教学模式“现代机电控制”教学大纲(CourseOutline)一、指导思想坚持“工程选择科学”的教学理念,采用项目研究式案例教学模式。以一个工程项目的设计为任务牵引,以问题为驱动,以设计与实验为主要方式,提高学生综合运用基础知识和工程工具解决工程实际问题的能力。二、教学目的(OBJECTIVEOFCOURSE)1)加深巩固学生已学的基础理论和知识,构建知识树,了解和掌握本专业的工程实践知识和工程工具,初步掌握机电一体化系统的设计和开发技术;2)通过工程项目设计综合实践,培养学生理论联系实际,提高学生综合运用所学知识分析解决技术问题的方法和工程实践能力,培养创新意识和团队协作精神。三、教学形式(OVERVIEWOFCOURSE)•以课堂讲授和项目实践相结合,1:1;•以实验指导与助教答疑给予实践引导•重点以项目实践评估课程成绩(能力评价)研究型教学实践关键内容一般机电控制工程课程体系•概念、定义、组成、范围、分类;•设计方法(准则,步骤,外观);•机械-结构与传动(滚珠丝杠传动、齿轮传动、谐波齿轮传动、齿形带传动、导轨、主轴组件、支承件)•传感器-定位与检测(角位移、光栅位移、电磁感应)•伺服驱动(步进电机、直流电机、交流电机、开环伺服、闭环伺服)•微机原理与控制系统(原理,接口,运动规律、传递函数、控制算法)•典型机电控制实例-机器人与数控机床;•发展趋势课程内容(概述、总体设计(教学机器人、作业是数控工作台)、控制系统(AVR)、传感(编码器)、驱动(直流)、建模二阶分析MATLAB、算法PID、实现)序号教学内容备注1机电控制的基本概念、组成与原理、关键技术理论2机电一体化系统总体设计方法,项目研发计划书理论3机电控制硬件基础(微机控制系统简介、AVR单片机)理论4AVR单片机开发工具的使用方法,I/O口、定时器、串口使用实践5传感器分类、常用传感器(编码器)的选用及接口理论6伺服驱动系统设计理论7直流电机驱动、传感器实验,熟悉AVR单片机开发板实践8教学机器人系统建模、仿真与分析实例理论9PID校正理论及PID数字控制器设计理论10MATLAB/Simulink控制系统建模、仿真与分析软件操作实践11直线运动单元建模仿真分析(大作业2)实践12直线运动单元建模仿真分析(大作业2)实践13直线运动单元速度控制系统(大作业3)实践14直线运动单元速度控制系统(大作业3)实践15直线运动单元速度控制系统(大作业3)实践16研讨课理论教学形式(OVERVIEWOFCOURSE)教学形式主要采用理论讲课小组实验课堂研讨重点放在学生自主学习、研究与实验方面,并通过随机抽查研讨、讲解来检验和评估学生学习效果。要求学生认真听讲,积极发言阐述自己观点,按时独立自主完成布置作业,展示自己实验结果,研讨自己学习与实验体会。课程安排(TOPICSARRANGEMENTS)主线:机电系统概述设计方法部件选型系统建模与分析控制系统开发数控综合运用学习研发交流前沿发展趋势。课程内容安排序号教学内容备注1机电控制的基本概念、组成与原理、关键技术理论2机电一体化系统总体设计方法,项目研发计划书理论3机电控制硬件基础(微机控制系统简介、AVR单片机)理论4AVR单片机开发工具的使用方法,I/O口、定时器、串口使用实践5传感器分类、常用传感器(编码器)的选用及接口理论6伺服驱动系统设计理论7直流电机驱动、传感器实验,熟悉AVR单片机开发板实践8教学机器人系统建模、仿真与分析实例理论9PID校正理论及PID数字控制器设计理论10MATLAB/Simulink控制系统建模、仿真与分析软件操作实践11直线运动单元建模仿真分析(大作业2)实践12直线运动单元建模仿真分析(大作业2)实践13直线运动单元速度控制系统(大作业3)实践14直线运动单元速度控制系统(大作业3)实践15直线运动单元速度控制系统(大作业3)实践16研讨课理论五、考试方式与成绩(ExaminationandGRADING)•总分:100分作业1:作业2:作业3:平时:竞赛=20:25:3





